HashMap(数组+链表)
- HashMap基于hashing原理,我们通过put()和get()方法储存和获取对象。
- 当我们将键值对传递给put()方法时,它调用键对象的hashCode()方法来计算hashcode,然后找到bucket位置来储存值对象。
- 当获取对象时,通过键对象的equals()方法找到正确的键值对,然后返回值对象。
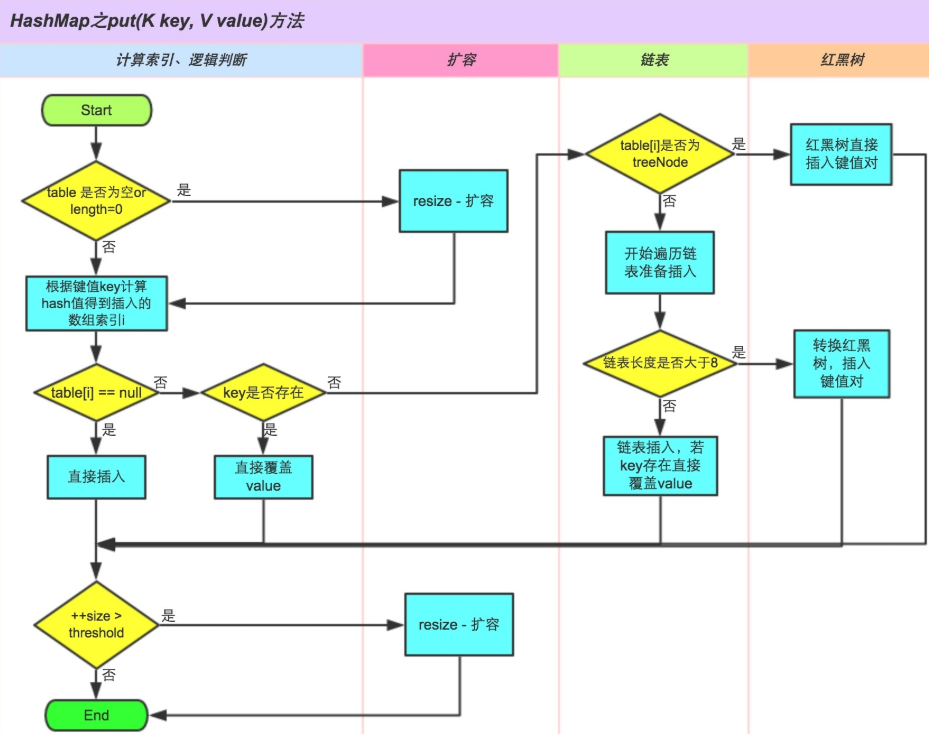
public V put(K key, V value) {
return putVal(hash(key), key, value, false, true);
}
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,
boolean evict) {
Node<K,V>[] tab; Node<K,V> p; int n, i;
//1. 如果当前table为空,新建默认大小的table
if ((tab = table) == null || (n = tab.length) == 0)
n = (tab = resize()).length;
//2. 获取当前key对应的节点
if ((p = tab[i = (n - 1) & hash]) == null)
//3. 如果不存在,新建节点
tab[i] = newNode(hash, key, value, null);
//4. 存在节点
else {
Node<K,V> e; K k;
//5. key的hash相同,key的引用相同或者key equals,则覆盖
if (p.hash == hash &&
((k = p.key) == key || (key != null && key.equals(k))))
e = p;
//6.如果当前节点是一个红黑树树节点,则添加树节点
else if (p instanceof TreeNode)
e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
//7.不是红黑树节点,也不是相同节点,则表示为链表结构
else {
//遍历链表
for (int binCount = 0; ; ++binCount) {
//8. 找到最后那个节点
if ((e = p.next) == null) {
p.next = newNode(hash, key, value, null);
//9. 如果链表长度超过8转成红黑树
if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
treeifyBin(tab, hash);
break;
}
//10.如果链表中有相同的节点,则覆盖
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
break;
p = e;
}
}
if (e != null) { // existing mapping for key
V oldValue = e.value;
if (!onlyIfAbsent || oldValue == null)
e.value = value;
afterNodeAccess(e);
return oldValue;
}
}
++modCount;
//是否超过容量,超过需要扩容
if (++size > threshold)
resize();
afterNodeInsertion(evict);
return null;
}
static final int hash(Object key) {
int h;
return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16);
}
仔细观察哈希值的源头,我们会发现,它并不是 key 本身的 hashCode, 而是来自于HashMap 内部的另外一个 hash 方法。
为什么这里需要将高位数据移位到低位进行异或算呢?
这是因为有些数据计算出的哈希值差异主要在高位,而 HashMap 里的哈希寻址是忽略容量以上的高位的, 那么这种处理就可以有效避免类似情况下的哈希碰撞。
resize 方法的源码设计
final Node<K,V>[] resize() {
// ...
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACIY &&
oldCap >= DEFAULT_INITIAL_CAPAITY)
newThr = oldThr << 1; // double there
// ...
else if (oldThr > 0) // initial capacity was placed in threshold
newCap = oldThr;
else {
// zero initial threshold signifies using defaultsfults
newCap = DEFAULT_INITIAL_CAPAITY;
newThr = (int)(DEFAULT_LOAD_ATOR* DEFAULT_INITIAL_CAPACITY;
}
if (newThr ==0) {
float ft = (float)newCap * loadFator;
newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?(int)ft : Intege
}
threshold = neThr;
Node<K,V>[] newTab = (Node<K,V>[])new Node[newap];
table = n;
// 移动到新的数组结构 e 数组结构
}
依据 resize 源码,不考虑极端情况(容量理论最大极限由 MAXIMUM_CAPACITY 指定,数值为 1«30,也就是 2 的 30 次方), 我们可以归纳为:
- 门限值等于(负载因子)*(容量),如果构建 HashMap 的时候没有指定它们,那么就是依据相应的默认常量值。
- 门限通常是以倍数进行调整 (newThr = oldThr « 1),我前面提到,根据 putVal 中的逻辑,当元素个数超过门限大小时,则调整 Map 大小。
- 扩容后,需要将老的数组中的元素重新放置到新的数组,这是扩容的一个主要开销来源。
容量、负载因子和树化
容量和负载系数决定了可用的桶的数量,空桶太多会浪费空间,如果使用的太满则会严重影响操作的性能。 极端情况下,假设只有一个桶,那么它就退化成了链表,完全不能提供所谓常数时间存的性能。
如果能够知道 HashMap 要存取的键值对数量,可以考虑预先设置合适的容量大小。 具体数值我们可以根据扩容发生的条件来做简单预估,根据前面的代码分析,我们知道它需要符合计算条件:负载因子 * 容量 > 元素数量, 所以,预先设置的容量需要满足,大于“预估元素数量 / 负载因子”,同时它是 2 的幂数,结论已经非常清晰了。
对于负载因子如果没有特别需求,不要轻易进行更改,因为 JDK 自身的默认负载因子是非常符合通用场景的需求的。
如果确实需要调整,建议不要设置超过 0.75 的数值,因为会显著增加冲突,降低 HashMap的性能。
如果使用太小的负载因子,按照上面的公式,预设容量值也进行调整,否则可能会导致更加频繁的扩容,增加无谓的开销,本身访问性能也会受影响。
树化改造,对应逻辑主要在 putVal 和 treeifyBin 中。
final void treeifyBin(Node<K,V>[] tab, int hash) {
int n, index; Node<K,V> e;
if (tab == null || (n = tab.length) < MIN_TREEIFY_CAPACITY)
resize();
else if ((e = tab[index = (n - 1) & hash]) != null) {
// 树化改造逻辑
}
}
综合这两个方法,树化改造的逻辑就非常清晰了,可以理解为,当 bin 的数量大于 TREEIFY_THRESHOLD 时:
- 如果容量小于 MIN_TREEIFY_CAPACITY,只会进行简单的扩容。
- 如果容量大于 MIN_TREEIFY_CAPACITY ,则会进行树化改造。
那么,为什么 HashMap 要树化呢?
本质上这是个安全问题。因为在元素放置过程中,如果一个对象哈希冲突,都被放置到同一个桶里,则会形成一个链表,
我们知道链表查询是线性的,会严重影响存取的性能。
而在现实世界,构造哈希冲突的数据并不是非常复杂的事情,恶意代码就可以利用这些数据大量与服务器端交互,
导致服务器端 CPU 大量占用,这就构成了哈希碰撞拒绝服务攻击,国内一线互联网公司就发生过类似攻击事件。
当两个对象的hashcode相同
它们会储存在同一个bucket位置的链表中。因为hashcode相同,所以它们的bucket位置相同,‘碰撞’会发生。 因为HashMap使用链表存储对象,这个Entry(包含有键值对的Map.Entry对象)会存储在链表中。
HashMap 内部的结构,它可以看作是数组(Node[] table)和链表结合组成的复合结构, 数组被分为一个个桶(bucket),通过哈希值决定了键值对在这个数组的寻址; 哈希值相同的键值对,则以链表形式存储。 这里需要注意的是,如果链表大小超过阈值(TREEIFY_THRESHOLD, 8),的链表就会被改造为树形结构。
两个键的hashcode相同,如何获取值对象
当我们调用get()方法,HashMap会使用键对象的hashcode找到bucket位置,找到bucket位置之后,会调用keys.equals()方法去找到链表中正确的节点,最终找到要找的值对象。
HashMap的大小超过了负载因子(load factor)定义的容量,会发生什么?
对象会进行rehashing,调用hash方法找到新的bucket位置。
默认的负载因子大小为0.75,也就是说,当一个map填满了75%的bucket时候,和其它集合类(如ArrayList等)一样,将会创建原来HashMap大小的两倍的bucket数组,来重新调整map的大小,并将原来的对象放入新的bucket数组中。
调整HashMap大小存在什么问题
多线程的情况下,可能产生条件竞争(race condition)。如果两个线程都发现HashMap需要重新调整大小了,它们会同时试着调整大小。
为什么String, Interger这样的wrapper类适合作为键
因为wrapper类如String是不可变的,也是final的,而且重写了equals()和hashCode()方法了,防止计算hashCode()改变键值。
如果键值在放入时和获取时返回不同的hashcode的话,那么就不能从HashMap中找到你想要的对象。
也可以使用自定义的对象作为键,条件是遵守equals()和hashCode()方法的定义规则,并且当对象插入到Map中之后将不会再改变了。
HashMap与HashSet
| HashMap | HashSet |
|---|---|
| 实现了Map接口 | 实现了Set接口(构造new HashMap) |
| put()存键值对 | add()存储对象 |
| 使用键对象来计算hashcode值 | 使用成员对象来计算hashcode值,对于两个对象来说hashcode可能相同,所以equals()方法用来判断对象的相等性,如果两个对象不同的话,那么返回false |
HashMap与Hashtable
- HashMap几乎等于Hashtable,除了HashMap是非synchronized的,并可以接受null(HashMap可以接受为null的键值(key)和值(value),而Hashtable则不行)。
- HashMap是非synchronized,而Hashtable是synchronized。Java 5提供了ConcurrentHashMap,可以替代HashTable
- HashMap的迭代器(Iterator)是fail-fast迭代器,而Hashtable的enumerator迭代器非fail-fast。所以当有其它线程通过map对象改变了HashMap的结构(增加或者移除元素),会抛出ConcurrentModificationException,但迭代器本身的remove()方法移除元素则不会抛出这个异常。
- 由于Hashtable是线程安全的也是synchronized,所以在单线程环境下它比HashMap要慢。
- HashMap不能保证随着时间的推移Map中的元素次序是不变的。
如何保证容器是线程安全的?ConcurrentHashMap 如何实现高效地线程安全?
Java 提供了不同层面的线程安全支持。在传统集合框架内部,除了 Hashtable 等同步容器, 还提供了所谓的同步包装器(Synchronized Wrapper),我们可以调用 Collections 工具类提供的包装方法,来获取一个同步的包装容器(如 Collections.synchronizedMap), 但是它们都是利用非常粗粒度的同步方式,在高并发情况下,性能比较低下。
另外,更加普遍的选择是利用并发包提供的线程安全容器类,它提供了:
- 各种并发容器,比如 ConcurrentHashMap、CopyOnWriteArrayList。
- 各种线程安全队列(Queue/Deque),如 ArrayBlockingQueue、SynchronousQueue。
- 各种有序容器的线程安全版本等。
具体保证线程安全的方式,包括有从简单的 synchronize 方式,
到基于更加精细化的,比如基于分离锁实现的 ConcurrentHashMap 等并发实现等。
具体选择要看开发的场景需求,总体来说,并发包内提供的容器通用场景,远优于早期的简单同步实现。
CocurrentHashMap与Hashtable (为什么需要 ConcurrentHashMap?)
Hashtable是synchronized的(基本就是将 put、get、size 等各种方法加上“synchronized”), 简单来说,这就导致了所有并发操作都要竞争同一把锁,一个线程在进行同步操作时,其他线程只能等待,大大降低了并发操作的效率。
同步包装器只是利用输入 Map 构造了另一个同步版本,所有操作虽然不再声明成为 synchronized 方法, 但是还是利用了“this”作为互斥的 mutex,没有真正意义上的改进。
private static class SynchronizedMap<K,V>
implements Map<K,V>, Serializable {
private static final long serialVersionUID = 1978198479659022715L;
private final Map<K,V> m; // Backing Map
final Object mutex; // Object on which to synchronize
...
public int size() {
synchronized (mutex) {return m.size();}
}
public boolean isEmpty() {
synchronized (mutex) {return m.isEmpty();}
}
...
}
所以Hashtable 或者同步包装版本,都只是适合在非高度并发的场景下。
ConcurrentHashMap 同步性能更好,因为它仅仅根据同步级别对map的一部分进行上锁。 ConcurrentHashMap的设计实现其实一直在演化,在 Java 8 中就发生了非常大的变化(ava 7 其实也有不少更新)。
早期 ConcurrentHashMap,其实现是基于:
- 分离锁,也就是将内部进行分段(Segment),里面则是 HashEntry 的数组,和 HashMap类似,哈希相同的条目也是以链表形式存放。
- HashEntry 内部使用 volatile 的 value 字段来保证可见性,也利用了不可变对象的机制以改进利用 Unsafe 提供的底层能力,比如 volatile access,去直接完成部分操作,以最优化性能,毕竟 Unsafe 中的很多操作都是 JVM intrinsic 优化过的。
在构造的时候,Segment 的数量由所谓的 concurrentcyLevel 决定,默认是 16,也可以在相应构造函数直接指定。 注意,Java 需要它是 2 的幂数值,如果输入是类似 15 这种非幂值,会被自动调整到 16 。
ConcurrentHashMap(JDK7)并发写操作时:
ConcurrentHashMap 会获取再入锁,以保证数据一致性,Segment 本身就是基于ReentrantLock 的扩展实现,
所以,在并发修改期间,相应 Segment 是被锁定的。
在最初阶段,进行重复性的扫描,以确定相应 key 值是否已经在数组里面,进而决定是更新还是放置操作。
重复扫描、检测冲突是ConcurrentHashMap 的常见技巧。
ConcurrentHashMap进行的不是整体的扩容,而是单独对 Segment进行扩容。
Map 的 size 方法同样需要关注,它的实现涉及分离锁的一个副作用。
如果不进行同步,简单的计算所有 Segment 的总值,可能会因为并发 put,导致结果不准确,
但是直接锁定所有 Segment 进行计算,就会变得非常昂贵。
所以,ConcurrentHashMap 的实现是通过重试机制(RETRIES_BEFORE_LOCK,指定重试次数 2),来试图获得可靠值。
如果没有监控到发生变化(通过对比 Segment.modCount),就直接返回,否则获取锁进行操作。
在 Java 8 和之后的版本中,ConcurrentHashMap 发生了哪些变化呢
- 总体结构上,它的内部存储变得和 HashMap 结构非常相似,同样是大的桶(bucket)数组,然后内部也是一个个所谓的链表结构(bin),同步的粒度要更细致一些。
- 其内部仍然有 Segment 定义,但仅仅是为了保证序列化时的兼容性而已,不再有任何结构上的用处。
- 因为不再使用 Segment,初始化操作大大简化,修改为 lazy-load 形式,这样可以有效避免初始开销,解决了老版本很多人抱怨的这一点。
- 数据存储利用 volatile 来保证可见性。
- 使用 CAS 等操作,在特定场景进行无锁并发操作。
- 使用 Unsafe、LongAdder 之类底层手段,进行极端情况的优化。